Journals > > Topics > Fiber Optics and Optical Communications
Fiber Optics and Optical Communications|1694 Article(s)

Ultrasonic Detection of Water Content in Rock Mass Based on FBG-FPI Optical Fiber Sensor
Wanwan Kang, Zhihua Shao, Kuangyu Zhou, and Xueguang Qiao
ObjectiveRocks have both mechanical and acoustic properties, and there exist inherent relations among them. The characteristics of ultrasonic waves (UWs) change when passing through rocks, and the UWs carry the structural information of rocks. Thus, the interior properties of rocks can be obtained by analyzing the received UWs. Nowadays, the hydraulic properties of rocks have become a new focus in the engineering field. For example, in oil and gas exploration, the water content affects the density and strength of reservoir rocks. The analysis results of the reservoir structure are directly affected by the varied amplitude and velocity of exploration waves. In rock engineering, such as solution mining, long-distance tunnels, and reservoir bank slopes, the pore water affects the stability of rocks and even threatens the safety of engineering projects. Therefore, it is significant to study the ultrasonic propagation characteristics of rocks during water absorption and softening.At present, a common method to detect the water content is to employ the piezoelectric transducer (PZT). However, the PZT has some inherent drawbacks, such as large size, narrow bandwidth, and low resistance to electromagnetic disturbance, which decreases the detection resolution and brings large deviations. Optical fiber sensors feature compact size, high sensitivity, broadband response, and sound resistance to electromagnetic interference. The most commonly employed optical fiber sensors in ultrasonic detection are Fabry-Perot interferometer (FPI) and fiber Bragg grating (FBG). The FPI sensors usually suffer from the low-reflection reflectors and the FBG encounter difficulties when utilized with high-frequency UWs. Fortunately, the optical fiber FPI constructed with two FBGs combines the advantages of both FPI and FBG and becomes the preferred solution in ultrasonic rock water content detection.MethodsWe propose a new ultrasonic method based on an FBG-FPI optical fiber sensor for water-content detection in rocks. In experiments, red sandstone is employed as the detecting object (cylinder, 80 mm×100 mm). The 1 MHz longitudinal pulsed wave emitted by PZT is adopted as the ultrasonic source. The transmitted UWs are detected by a pair of fiber gratings inscribed into a thin core fiber (TCF). The UWs velocity can be calculated by measuring the transmission distance and flight time inside the rock. The method of fast Fourier transform (FFT) is leveraged to convert time-domain signals into frequency-domain ones. For the frequency-domain results, the main frequency and the normalized amplitude are extracted respectively. By employing the fitted curve between the measured UWs velocity and the rock water variation, the water content is reconstructed, and an average detection deviation is obtained simultaneously. Additionally, the results measured by PZT are also recorded for comparison in identical conditions.Results and DiscussionsThe experiment results show that in the longitudinal wave conditions, the wave velocity of the red sandstone first decreases and then increases with the rising water content, while the main frequency and corresponding amplitude both decrease with the increasing water content. When the water content increases from 0 to 0.16%, the wave velocity measured by the optical fiber sensor (or PZT) decreases from 3440.86 m/s (or 3691.74 m/s) to 3389.83 m/s (or 3681.55 m/s). When the water content rises from 0.16% to 2.33%, the wave velocity measured by the optical fiber sensor (or PZT) increases from 3389.83 m/s (or 3681.55 m/s) to 4020.10 m/s (or 3980.10 m/s) (Fig. 5). When the water content increases from 0 to 2.33%, the main frequency measured by the optical fiber sensor (or PZT) decreases from 1.000 MHz (or 0.987 MHz) to 0.933 MHz (or 0.887 MHz), and the normalized amplitude reduces from 1.000 (or 1.000) to 0.058 (or 0.040) (Fig. 6). The optical fiber sensor and PZT are found to exhibit the similar response tendency with the changing water content. After water content reconstruction, an average absolute deviation between the optical fiber sensor (or PZT) measurement results and the actual values is approximately 0.055 (or 0.069) (Fig. 7). It is shown that the deviation of the FBG-FPI optical fiber sensor is smaller, which proves the optical fiber ultrasonic detection feasibility of rock water.ConclusionsA new optical fiber method is proposed for the ultrasonic detection of water content in rock mass. The time-domain and frequency-domain results are obtained using an FBG-FPI optical fiber sensor by ultrasonic transmission method. In the comparative experiments, the FBG-FPI optical fiber sensor presents a similar response tendency to PZT with increasing water content. Additionally, the FBG-FPI optical fiber sensor has a smaller detection deviation than that of PZT. Furthermore, laser ultrasound can be employed as a broadband source to replace piezoelectric excitation and helps to improve the detection resolution with the broadband response of optical fiber sensors. ObjectiveRocks have both mechanical and acoustic properties, and there exist inherent relations among them. The characteristics of ultrasonic waves (UWs) change when passing through rocks, and the UWs carry the structural information of rocks. Thus, the interior properties of rocks can be obtained by analyzing the received UWs. Nowadays, the hydraulic properties of rocks have become a new focus in the engineering field. For example, in oil and gas exploration, the water content affects the density and strength of reservoir rocks. The analysis results of the reservoir structure are directly affected by the varied amplitude and velocity of exploration waves. In rock engineering, such as solution mining, long-distance tunnels, and reservoir bank slopes, the pore water affects the stability of rocks and even threatens the safety of engineering projects. Therefore, it is significant to study the ultrasonic propagation characteristics of rocks during water absorption and softening.At present, a common method to detect the water content is to employ the piezoelectric transducer (PZT). However, the PZT has some inherent drawbacks, such as large size, narrow bandwidth, and low resistance to electromagnetic disturbance, which decreases the detection resolution and brings large deviations. Optical fiber sensors feature compact size, high sensitivity, broadband response, and sound resistance to electromagnetic interference. The most commonly employed optical fiber sensors in ultrasonic detection are Fabry-Perot interferometer (FPI) and fiber Bragg grating (FBG). The FPI sensors usually suffer from the low-reflection reflectors and the FBG encounter difficulties when utilized with high-frequency UWs. Fortunately, the optical fiber FPI constructed with two FBGs combines the advantages of both FPI and FBG and becomes the preferred solution in ultrasonic rock water content detection.MethodsWe propose a new ultrasonic method based on an FBG-FPI optical fiber sensor for water-content detection in rocks. In experiments, red sandstone is employed as the detecting object (cylinder, 80 mm×100 mm). The 1 MHz longitudinal pulsed wave emitted by PZT is adopted as the ultrasonic source. The transmitted UWs are detected by a pair of fiber gratings inscribed into a thin core fiber (TCF). The UWs velocity can be calculated by measuring the transmission distance and flight time inside the rock. The method of fast Fourier transform (FFT) is leveraged to convert time-domain signals into frequency-domain ones. For the frequency-domain results, the main frequency and the normalized amplitude are extracted respectively. By employing the fitted curve between the measured UWs velocity and the rock water variation, the water content is reconstructed, and an average detection deviation is obtained simultaneously. Additionally, the results measured by PZT are also recorded for comparison in identical conditions.Results and DiscussionsThe experiment results show that in the longitudinal wave conditions, the wave velocity of the red sandstone first decreases and then increases with the rising water content, while the main frequency and corresponding amplitude both decrease with the increasing water content. When the water content increases from 0 to 0.16%, the wave velocity measured by the optical fiber sensor (or PZT) decreases from 3440.86 m/s (or 3691.74 m/s) to 3389.83 m/s (or 3681.55 m/s). When the water content rises from 0.16% to 2.33%, the wave velocity measured by the optical fiber sensor (or PZT) increases from 3389.83 m/s (or 3681.55 m/s) to 4020.10 m/s (or 3980.10 m/s) (Fig. 5). When the water content increases from 0 to 2.33%, the main frequency measured by the optical fiber sensor (or PZT) decreases from 1.000 MHz (or 0.987 MHz) to 0.933 MHz (or 0.887 MHz), and the normalized amplitude reduces from 1.000 (or 1.000) to 0.058 (or 0.040) (Fig. 6). The optical fiber sensor and PZT are found to exhibit the similar response tendency with the changing water content. After water content reconstruction, an average absolute deviation between the optical fiber sensor (or PZT) measurement results and the actual values is approximately 0.055 (or 0.069) (Fig. 7). It is shown that the deviation of the FBG-FPI optical fiber sensor is smaller, which proves the optical fiber ultrasonic detection feasibility of rock water.ConclusionsA new optical fiber method is proposed for the ultrasonic detection of water content in rock mass. The time-domain and frequency-domain results are obtained using an FBG-FPI optical fiber sensor by ultrasonic transmission method. In the comparative experiments, the FBG-FPI optical fiber sensor presents a similar response tendency to PZT with increasing water content. Additionally, the FBG-FPI optical fiber sensor has a smaller detection deviation than that of PZT. Furthermore, laser ultrasound can be employed as a broadband source to replace piezoelectric excitation and helps to improve the detection resolution with the broadband response of optical fiber sensors.
Acta Optica Sinica
- Publication Date: Apr. 25, 2024
- Vol. 44, Issue 8, 0806003 (2024)

Distributed Refractive Index Sensing Based on Differential Phase in Optical Frequency Domain Reflectometry
Peidong Hua, Zhenyang Ding, Kun Liu, Haohan Guo, Teng Zhang, Sheng Li, Ji Liu, Junfeng Jiang, and Tiegen Liu
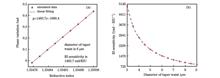
ObjectiveOptical fiber refractive index (RI) sensors have caught widespread attention from researchers in biochemical sensing and environmental monitoring due to their high precision, high sensitivity, resistance to electromagnetic interference, corrosion resistance, low cost, and easy preparation. The commonly employed optical fiber RI sensors currently include surface plasmon resonance, local surface plasmon resonance, fiber Bragg gratings, long-period fiber Bragg gratings, fiber-optic whispering gallery mode, fiber Fabry-Perot sensors, photonic crystal fibers, D-type fibers, and tapered fibers. However, most fiber optic RI sensors are currently single-point sensors and cannot achieve multi-point detection or even distributed sensing. Based on the detection of Rayleigh backscattering spectra (RBS) in optical fiber, optical frequency domain reflectometry (OFDR) features high measurement accuracy, high sensing spatial resolution, and long measurement distance, which makes it very suitable for distributed RI sensing. Distributed RI sensing can not only obtain the RI magnitude in the solution but also locally detect the diffusion processing of the solution and test the distribution of fluids. These are all that single-point sensors or even quasi-distributed sensors cannot achieve.MethodsTraditional distributed RI sensing based on OFDR adopts a cross-correlation demodulation algorithm, which has sound noise suppression ability and stability. However, it is difficult to achieve distributed RI measurements with a micron-level spatial resolution. Therefore, this type of distributed RI sensing based on cross-correlation demodulation is not enough to be applied to distributed biological analysis, drug design, and other fields. Unlike cross-correlation demodulation methods, OFDR based on differential relative phase demodulation realizes sensing by the relative phase change of RBS. Since the differential phase demodulation method directly measures the relative phase change caused by external RI changes, this method is more sensitive than traditional cross-correlation demodulation methods. Therefore, the differential relative phase demodulation method is expected to achieve distributed RI sensing with a micron-level spatial resolution.Results and DiscussionsWe first theoretically analyze the principle of differential relative phase demodulation and the RI sensitivity characteristics. To characterize the theoretical sensitivity of the differential phase demodulation method and compare it with experimental results, we simulate the relationship between phase variation and external RI change at a taper waist of 6 μm. The simulation results are shown in Fig. 1(a), and the slope of 1483.7 rad/RIU is the theoretical sensitivity. Meanwhile, in Eq. (11), Δf is related to taper waist radius r. Therefore, the relationship between theoretical sensitivity and the diameter of the taper waist can be simulated, with the results shown in Fig. 1(b). In the experiment, the phase variations along distance in the sensing area of tapered fiber are compared when only average denoising and wavelet denoising are adopted. This reveals that only average denoising cannot achieve distributed RI sensing at the micron level. Meanwhile, with only wavelet denoising, the phase variations caused by the RI changes in the sensing region with a spatial resolution of 68 μm can be distinguished. However, due to the excessive phase noise in the subfigure of Fig. 5(b), there are still significant fluctuations in the demodulation signal of the sensing region. After average denoising (H=5) and wavelet denoising, phase fluctuation noise can be well suppressed with a sensing spatial resolution of 340 μm. The phase variations along the fiber distance under different RI can be clearly distinguished. The results are shown in Fig. 6(c). A linear fitting curve between phase variations and the external RI change at the effective sensing region is shown in Fig. 6(d) with a linear fit of 0.997. The maximum standard deviation at each RI is 0.0067 rad, and the smoothed measurement sensitivity is 1328.6 rad/RIU, which is close to the simulation results in Fig. 1(b). To compare the difference between the proposed differential phase demodulation method and the traditional cross-correlation demodulation method, we utilize cross-correlation demodulation to the data in Fig. 6. The linear fitting curve of the proposed differential phase demodulation method is better than that of the cross-correlation algorithm. Meanwhile, the standard error of the smoothed differential phase demodulation method is lower than that of the cross-correlation demodulation algorithm. More importantly, compared to the cross-correlation demodulation method, the differential phase demodulation method increases the sensing spatial resolution by 10 times, reaching the level of hundreds of micrometers.ConclusionsWe present distributed RI sensing by tapered fiber based on differential relative phase OFDR. The principle of the proposed method is theoretically analyzed and the sensitivity of phase variations with external RI changes are simulated. In the experiment, we achieve distributed RI sensing with a spatial resolution of 340 μm after average denoising and wavelet smoothing. The effective sensing area is 45 mm. The linear fitting between phase variations and external RI change is 0.997 and the maximum standard deviation at each RI is 0.0067 rad. The experimental RI sensitivity is 1328.6 rad/RIU, close to the simulation result of 1483.7 rad/RIU. The linear fitting and standard deviation of the differential phase method are better than those of the cross-correlation algorithm. More importantly, the sensing spatial resolution is improved by 10 times. The proposed differential relative phase method based on OFDR provides a foundation for achieving micrometer-level distributed biosensing. ObjectiveOptical fiber refractive index (RI) sensors have caught widespread attention from researchers in biochemical sensing and environmental monitoring due to their high precision, high sensitivity, resistance to electromagnetic interference, corrosion resistance, low cost, and easy preparation. The commonly employed optical fiber RI sensors currently include surface plasmon resonance, local surface plasmon resonance, fiber Bragg gratings, long-period fiber Bragg gratings, fiber-optic whispering gallery mode, fiber Fabry-Perot sensors, photonic crystal fibers, D-type fibers, and tapered fibers. However, most fiber optic RI sensors are currently single-point sensors and cannot achieve multi-point detection or even distributed sensing. Based on the detection of Rayleigh backscattering spectra (RBS) in optical fiber, optical frequency domain reflectometry (OFDR) features high measurement accuracy, high sensing spatial resolution, and long measurement distance, which makes it very suitable for distributed RI sensing. Distributed RI sensing can not only obtain the RI magnitude in the solution but also locally detect the diffusion processing of the solution and test the distribution of fluids. These are all that single-point sensors or even quasi-distributed sensors cannot achieve.MethodsTraditional distributed RI sensing based on OFDR adopts a cross-correlation demodulation algorithm, which has sound noise suppression ability and stability. However, it is difficult to achieve distributed RI measurements with a micron-level spatial resolution. Therefore, this type of distributed RI sensing based on cross-correlation demodulation is not enough to be applied to distributed biological analysis, drug design, and other fields. Unlike cross-correlation demodulation methods, OFDR based on differential relative phase demodulation realizes sensing by the relative phase change of RBS. Since the differential phase demodulation method directly measures the relative phase change caused by external RI changes, this method is more sensitive than traditional cross-correlation demodulation methods. Therefore, the differential relative phase demodulation method is expected to achieve distributed RI sensing with a micron-level spatial resolution.Results and DiscussionsWe first theoretically analyze the principle of differential relative phase demodulation and the RI sensitivity characteristics. To characterize the theoretical sensitivity of the differential phase demodulation method and compare it with experimental results, we simulate the relationship between phase variation and external RI change at a taper waist of 6 μm. The simulation results are shown in Fig. 1(a), and the slope of 1483.7 rad/RIU is the theoretical sensitivity. Meanwhile, in Eq. (11), Δf is related to taper waist radius r. Therefore, the relationship between theoretical sensitivity and the diameter of the taper waist can be simulated, with the results shown in Fig. 1(b). In the experiment, the phase variations along distance in the sensing area of tapered fiber are compared when only average denoising and wavelet denoising are adopted. This reveals that only average denoising cannot achieve distributed RI sensing at the micron level. Meanwhile, with only wavelet denoising, the phase variations caused by the RI changes in the sensing region with a spatial resolution of 68 μm can be distinguished. However, due to the excessive phase noise in the subfigure of Fig. 5(b), there are still significant fluctuations in the demodulation signal of the sensing region. After average denoising (H=5) and wavelet denoising, phase fluctuation noise can be well suppressed with a sensing spatial resolution of 340 μm. The phase variations along the fiber distance under different RI can be clearly distinguished. The results are shown in Fig. 6(c). A linear fitting curve between phase variations and the external RI change at the effective sensing region is shown in Fig. 6(d) with a linear fit of 0.997. The maximum standard deviation at each RI is 0.0067 rad, and the smoothed measurement sensitivity is 1328.6 rad/RIU, which is close to the simulation results in Fig. 1(b). To compare the difference between the proposed differential phase demodulation method and the traditional cross-correlation demodulation method, we utilize cross-correlation demodulation to the data in Fig. 6. The linear fitting curve of the proposed differential phase demodulation method is better than that of the cross-correlation algorithm. Meanwhile, the standard error of the smoothed differential phase demodulation method is lower than that of the cross-correlation demodulation algorithm. More importantly, compared to the cross-correlation demodulation method, the differential phase demodulation method increases the sensing spatial resolution by 10 times, reaching the level of hundreds of micrometers.ConclusionsWe present distributed RI sensing by tapered fiber based on differential relative phase OFDR. The principle of the proposed method is theoretically analyzed and the sensitivity of phase variations with external RI changes are simulated. In the experiment, we achieve distributed RI sensing with a spatial resolution of 340 μm after average denoising and wavelet smoothing. The effective sensing area is 45 mm. The linear fitting between phase variations and external RI change is 0.997 and the maximum standard deviation at each RI is 0.0067 rad. The experimental RI sensitivity is 1328.6 rad/RIU, close to the simulation result of 1483.7 rad/RIU. The linear fitting and standard deviation of the differential phase method are better than those of the cross-correlation algorithm. More importantly, the sensing spatial resolution is improved by 10 times. The proposed differential relative phase method based on OFDR provides a foundation for achieving micrometer-level distributed biosensing.
Acta Optica Sinica
- Publication Date: Apr. 25, 2024
- Vol. 44, Issue 8, 0806002 (2024)

Auxiliary Management and Control Channel Transmission and Performance of High-Speed Coherent Frequency Division Multiplexing Passive Optical Network System
Wangwei Shen, Jiaye Wang, Guoqiang Li, Sizhe Xing, An Yan, Zhongya Li, Jianyang Shi, Nan Chi, and Junwen Zhang
ObjectiveWith the development of the new generation of mobile communication technology, there is an increased demand for bandwidth, speed, and latency in passive optical networks (PONs). Wavelength-division multiplexing PON (WDM-PON) which utilizes frequency resources for bandwidth allocation can assign different channels to different optical network units (ONUs) simultaneously. This eliminates time slot competition among ONUs, reduces system latency, and holds promise for addressing high-latency issues. An embedded communication channel called the auxiliary management and control channel (AMCC) has been proposed and successfully implemented in WDM-PON to enable the transmission of management and control information at a lower cost without altering the frame structure. In recent years, there has been increasing attention to frequency-division multiplexing coherent PON (FDM-CPON), which also supports bandwidth allocation in the frequency domain. To complete AMCC transmission in FDM-CPON, we put forward two simple and cost-effective transmission mechanisms of transmission management and control signal for FDM-CPON, including the addition and multiplication of AMCC and data channel at the digital end. Meanwhile, we conduct a comparative analysis on the performance of these two transmission mechanisms in a 200 Gbit/s FDM-CPON system based on 16QAM transmission over 20-km fiber. The research results provide references for AMCC transmission and system design of high-speed FDM-CPON in the future.MethodsTo implement the two transmission mechanisms and conduct a comparative analysis on their performance in a 200 Gbit/s FDM-CPON system based on 16QAM transmission over a 20-km fiber, we generate 16QAM and on-off keying (OOK) signals for the transmission of data channel and AMCC at the digital end respectively. After mapping the low level in OOK to 1 and the high level to a real number greater than 1, the OOK signal can be up-sampled to the same length as the data channel signal. By multiplying bitwise, the combination of multiplication-based AMCC and the data channel can be achieved. For addition-based AMCC, the low level in OOK should be mapped to 0, while the high level is mapped to a complex number with both real and imaginary parts greater than 0. This mapped signal is then added bitwise to the data channel signal. After the combination of AMCC and the data channel, the signal is received by an integrated coherent receiver (ICR) over a 20-km fiber. At the receiver, the amplitude of the received signal is extracted, and the amplitude variations of the signal are obtained by smoothing filtering. After energy detection and inverse mapping, the decoding of the OOK signal is completed. Simultaneously, the received signal undergoes the classical coherent digital signal processing (DSP) for decoding. Additionally, we modify the modulation index (MI) and bandwidth of AMCC at the transmitter, studying the performance of the two transmission mechanisms in different conditions.Results and DiscussionsWe test the sensitivity curves of data channel signals overlaid with both multiplication-based AMCC and addition-based AMCC under different MIs, as well as the Q curves of OOK signals transmitted by AMCC. Under the same receiver optical power (ROP) and MI, the influence of multiplication-based AMCC on the sensitivity of the data channel signal is smaller. Simultaneously, the Q value of OOK transmitted by multiplication-based AMCC is greater than that of addition-based AMCC. We also experimentally verify the effect of the MI and bandwidth of AMCC on the sensitivity of the data channel signal and the Q value of AMCC. Under the same MI and bandwidth, the data channel signal combined with multiplication-based AMCC exhibits higher sensitivity and power budget than the data-channel signal combined with addition-based AMCC. Meanwhile, the larger MI and bandwidth lead to a greater influence of AMCC on the performance of the data-channel signal. When the MI of AMCC is set at 26.1% with a corresponding bandwidth of 24.4 MHz, the effect of multiplication-based AMCC on signal sensitivity is 3 dB lower than that of addition-based AMCC.ConclusionsWe verify and compare the effects of multiplication-based AMCC and addition-based AMCC on the performance of the data channel signal and the OOK signal transmitted by AMCC in a high-speed FDM-CPON. Experimental results from a 200 Gbit/s FDM-CPON system based on 16QAM transmission over 20-km fiber indicate that multiplication-based AMCC has a smaller influence on the sensitivity and power budget of the data-channel signal, with higher Q value of the AMCC-transmitted signal. When the MI of AMCC is set at 26.1% with a corresponding bandwidth of 24.4 MHz, the effect of multiplication-based AMCC on signal sensitivity is 3 dB lower than that of addition-based AMCC. Additionally, experiments are conducted to assess the effect of different MIs and bandwidths of AMCC on the sensitivity of the data-channel signal, with results consistent with the conclusions drawn from theoretical analysis. The results provide significant references for AMCC transmission and system design of high-speed FDM-CPON in the future. ObjectiveWith the development of the new generation of mobile communication technology, there is an increased demand for bandwidth, speed, and latency in passive optical networks (PONs). Wavelength-division multiplexing PON (WDM-PON) which utilizes frequency resources for bandwidth allocation can assign different channels to different optical network units (ONUs) simultaneously. This eliminates time slot competition among ONUs, reduces system latency, and holds promise for addressing high-latency issues. An embedded communication channel called the auxiliary management and control channel (AMCC) has been proposed and successfully implemented in WDM-PON to enable the transmission of management and control information at a lower cost without altering the frame structure. In recent years, there has been increasing attention to frequency-division multiplexing coherent PON (FDM-CPON), which also supports bandwidth allocation in the frequency domain. To complete AMCC transmission in FDM-CPON, we put forward two simple and cost-effective transmission mechanisms of transmission management and control signal for FDM-CPON, including the addition and multiplication of AMCC and data channel at the digital end. Meanwhile, we conduct a comparative analysis on the performance of these two transmission mechanisms in a 200 Gbit/s FDM-CPON system based on 16QAM transmission over 20-km fiber. The research results provide references for AMCC transmission and system design of high-speed FDM-CPON in the future.MethodsTo implement the two transmission mechanisms and conduct a comparative analysis on their performance in a 200 Gbit/s FDM-CPON system based on 16QAM transmission over a 20-km fiber, we generate 16QAM and on-off keying (OOK) signals for the transmission of data channel and AMCC at the digital end respectively. After mapping the low level in OOK to 1 and the high level to a real number greater than 1, the OOK signal can be up-sampled to the same length as the data channel signal. By multiplying bitwise, the combination of multiplication-based AMCC and the data channel can be achieved. For addition-based AMCC, the low level in OOK should be mapped to 0, while the high level is mapped to a complex number with both real and imaginary parts greater than 0. This mapped signal is then added bitwise to the data channel signal. After the combination of AMCC and the data channel, the signal is received by an integrated coherent receiver (ICR) over a 20-km fiber. At the receiver, the amplitude of the received signal is extracted, and the amplitude variations of the signal are obtained by smoothing filtering. After energy detection and inverse mapping, the decoding of the OOK signal is completed. Simultaneously, the received signal undergoes the classical coherent digital signal processing (DSP) for decoding. Additionally, we modify the modulation index (MI) and bandwidth of AMCC at the transmitter, studying the performance of the two transmission mechanisms in different conditions.Results and DiscussionsWe test the sensitivity curves of data channel signals overlaid with both multiplication-based AMCC and addition-based AMCC under different MIs, as well as the Q curves of OOK signals transmitted by AMCC. Under the same receiver optical power (ROP) and MI, the influence of multiplication-based AMCC on the sensitivity of the data channel signal is smaller. Simultaneously, the Q value of OOK transmitted by multiplication-based AMCC is greater than that of addition-based AMCC. We also experimentally verify the effect of the MI and bandwidth of AMCC on the sensitivity of the data channel signal and the Q value of AMCC. Under the same MI and bandwidth, the data channel signal combined with multiplication-based AMCC exhibits higher sensitivity and power budget than the data-channel signal combined with addition-based AMCC. Meanwhile, the larger MI and bandwidth lead to a greater influence of AMCC on the performance of the data-channel signal. When the MI of AMCC is set at 26.1% with a corresponding bandwidth of 24.4 MHz, the effect of multiplication-based AMCC on signal sensitivity is 3 dB lower than that of addition-based AMCC.ConclusionsWe verify and compare the effects of multiplication-based AMCC and addition-based AMCC on the performance of the data channel signal and the OOK signal transmitted by AMCC in a high-speed FDM-CPON. Experimental results from a 200 Gbit/s FDM-CPON system based on 16QAM transmission over 20-km fiber indicate that multiplication-based AMCC has a smaller influence on the sensitivity and power budget of the data-channel signal, with higher Q value of the AMCC-transmitted signal. When the MI of AMCC is set at 26.1% with a corresponding bandwidth of 24.4 MHz, the effect of multiplication-based AMCC on signal sensitivity is 3 dB lower than that of addition-based AMCC. Additionally, experiments are conducted to assess the effect of different MIs and bandwidths of AMCC on the sensitivity of the data-channel signal, with results consistent with the conclusions drawn from theoretical analysis. The results provide significant references for AMCC transmission and system design of high-speed FDM-CPON in the future.
Acta Optica Sinica
- Publication Date: Apr. 25, 2024
- Vol. 44, Issue 8, 0806001 (2024)

Signal Impairments Compensation Based on Wavelength-Shift-Free Optical Phase Conjugation
Xiaoxue Gong, Wenling Xiao, Qihan Zhang, Tiantian Zhang, Xing Yin, and Lei Guo
ObjectiveMaximizing the transmission capacity of individual wavelength channels is necessary to meet the increasing capacity and distance requirements of metro optical networks. Orthogonal frequency division multiplexing (OFDM) technology can tolerate certain chromatic dispersion when signals are loaded onto each subcarrier, thus maximizing the transmission capacity within limited bandwidths during optical fiber transmission. In addition, intensity modulation-direct detection (IM-DD) is currently the most widely used method in metro optical network access layers. However, it is severely affected by fiber chromatic dispersion and cannot meet the needs of long-distance transmission in other layers of metro optical networks. Therefore, the IM-DD OFDM system combining the two technologies has received increasing attention. However, as the capacity and distance requirements of next-generation metro optical networks increase further, the dispersion problem will exceed the tolerable limit of OFDM, and the impact of nonlinear effects will become more obvious, causing a serious decline in system performance. Digital back-propagation (DBP) and optical phase conjugation (OPC) technologies are commonly used to compensate for chromatic dispersion and nonlinear effects simultaneously. However, DBP requires solving the inverse non-linear Schrodinger equation of the fiber channel, which has a high computational cost. When using OPC technology, when two sections of fiber have the same length, the even-order chromatic dispersion and pulse broadening caused by nonlinear effects accumulated in the first section of fiber will be completely recovered in the second section of fiber theoretically. However, traditional OPC schemes based on single-pump degenerate four-wave mixing (DFWM) have signal wavelength shifts at the phase conjugator, which changes the group velocity dispersion parameters in the second section of the fiber link. As a result, the OPC needs to be slightly shift from the midpoint of the fiber link to achieve complete signal impairment compensation. There is also a polarization sensitivity problem that reduces the efficiency of four-wave mixing (FWM), thus affecting the compensation performance of OPC waves in the system.MethodsWe propose a wavelength-shift-free OPC compensation scheme based on orthogonal polarization pumping non-degenerate four-wave mixing (NFWM) for IM-DD OFDM optical communication systems. It simultaneously compensates for chromatic dispersion and suppresses the impact of the nonlinear effects. First, we theoretically derive the principle of generating an OPC using orthogonal polarization pumping NFWM in a highly nonlinear fiber (HNLF). Based on the above principle, we design a wavelength-shift-free OPC implementation method to obtain an OPC wave with the same wavelength as the original signal in the orthogonal polarization state. Then, the factors that affect the power of the generated OPC wave are specifically analyzed. Finally, according to the optimized parameter settings, a simulation verification is performed.Results and DiscussionsThe pump optical power, the nonlinear coefficient, and the length of HNLF play a key role in the performance of IM-DD OFDM systems based on orthogonal polarization pumping NFWM for generating OPC. First, the impact of pump optical power is analyzed. Fig. 3 shows that the bit error rate (BER) varies with the change in the signal optical power injected into the OPC at different pump optical power values. It can be seen that a larger pump power will cause a sudden increase in the BER as the optical signal power continues to increase. The main reason for this is that the increase in pump power will lead to a large amplified spontaneous emission noise within the bandwidth of the generated OPC wave. The noise cannot be filtered out by an optical filter and will affect its compensation effectiveness. Next, the impact of the nonlinear coefficient and length of the HNLF on the system performance is analyzed. As shown in Fig. 4, with an increase in the nonlinear parameters, the BER is lower when the HNLF is shorter. However, its performance degrades as the length of HNLF increases. Finally, we compare the performance of the traditional OPC scheme without calculating the shift value at the midpoint, the traditional OPC scheme with midpoint-shift-value calculation, and our wavelength-shift-free OPC scheme. The BER curves varied with the received optical power (ROP), as shown in Fig. 5. It can be seen that our proposed system can achieve a 7% HD-FEC threshold at a rate of 114.375 Gbit/s through a standard single-mode fiber link with a length of 240 km, and the constellation points are relatively clear with few noise points.ConclusionsWe theoretically analyze and verify the feasibility and effectiveness of wavelength-shift-free OPC compensation for IM-DD OFDM optical communication systems based on orthogonal polarization pump NFWM. To achieve better performance for the system, we study various parameters that affect system performance. The performance comparison between the proposed scheme and the traditional OPC scheme is conducted, and it is found that the system based on wavelength-shift-free OPC transmission achieves a BER of 7% for HD-FEC threshold at an ROP of -10 dBm, while the system based on traditional OPC scheme cannot achieve the decision threshold even after midpoint-shift-value calculation under this transmission condition. Our scheme can provide a theoretical basis for the design of high-speed long-distance IM-DD OFDM optical communication systems. ObjectiveMaximizing the transmission capacity of individual wavelength channels is necessary to meet the increasing capacity and distance requirements of metro optical networks. Orthogonal frequency division multiplexing (OFDM) technology can tolerate certain chromatic dispersion when signals are loaded onto each subcarrier, thus maximizing the transmission capacity within limited bandwidths during optical fiber transmission. In addition, intensity modulation-direct detection (IM-DD) is currently the most widely used method in metro optical network access layers. However, it is severely affected by fiber chromatic dispersion and cannot meet the needs of long-distance transmission in other layers of metro optical networks. Therefore, the IM-DD OFDM system combining the two technologies has received increasing attention. However, as the capacity and distance requirements of next-generation metro optical networks increase further, the dispersion problem will exceed the tolerable limit of OFDM, and the impact of nonlinear effects will become more obvious, causing a serious decline in system performance. Digital back-propagation (DBP) and optical phase conjugation (OPC) technologies are commonly used to compensate for chromatic dispersion and nonlinear effects simultaneously. However, DBP requires solving the inverse non-linear Schrodinger equation of the fiber channel, which has a high computational cost. When using OPC technology, when two sections of fiber have the same length, the even-order chromatic dispersion and pulse broadening caused by nonlinear effects accumulated in the first section of fiber will be completely recovered in the second section of fiber theoretically. However, traditional OPC schemes based on single-pump degenerate four-wave mixing (DFWM) have signal wavelength shifts at the phase conjugator, which changes the group velocity dispersion parameters in the second section of the fiber link. As a result, the OPC needs to be slightly shift from the midpoint of the fiber link to achieve complete signal impairment compensation. There is also a polarization sensitivity problem that reduces the efficiency of four-wave mixing (FWM), thus affecting the compensation performance of OPC waves in the system.MethodsWe propose a wavelength-shift-free OPC compensation scheme based on orthogonal polarization pumping non-degenerate four-wave mixing (NFWM) for IM-DD OFDM optical communication systems. It simultaneously compensates for chromatic dispersion and suppresses the impact of the nonlinear effects. First, we theoretically derive the principle of generating an OPC using orthogonal polarization pumping NFWM in a highly nonlinear fiber (HNLF). Based on the above principle, we design a wavelength-shift-free OPC implementation method to obtain an OPC wave with the same wavelength as the original signal in the orthogonal polarization state. Then, the factors that affect the power of the generated OPC wave are specifically analyzed. Finally, according to the optimized parameter settings, a simulation verification is performed.Results and DiscussionsThe pump optical power, the nonlinear coefficient, and the length of HNLF play a key role in the performance of IM-DD OFDM systems based on orthogonal polarization pumping NFWM for generating OPC. First, the impact of pump optical power is analyzed. Fig. 3 shows that the bit error rate (BER) varies with the change in the signal optical power injected into the OPC at different pump optical power values. It can be seen that a larger pump power will cause a sudden increase in the BER as the optical signal power continues to increase. The main reason for this is that the increase in pump power will lead to a large amplified spontaneous emission noise within the bandwidth of the generated OPC wave. The noise cannot be filtered out by an optical filter and will affect its compensation effectiveness. Next, the impact of the nonlinear coefficient and length of the HNLF on the system performance is analyzed. As shown in Fig. 4, with an increase in the nonlinear parameters, the BER is lower when the HNLF is shorter. However, its performance degrades as the length of HNLF increases. Finally, we compare the performance of the traditional OPC scheme without calculating the shift value at the midpoint, the traditional OPC scheme with midpoint-shift-value calculation, and our wavelength-shift-free OPC scheme. The BER curves varied with the received optical power (ROP), as shown in Fig. 5. It can be seen that our proposed system can achieve a 7% HD-FEC threshold at a rate of 114.375 Gbit/s through a standard single-mode fiber link with a length of 240 km, and the constellation points are relatively clear with few noise points.ConclusionsWe theoretically analyze and verify the feasibility and effectiveness of wavelength-shift-free OPC compensation for IM-DD OFDM optical communication systems based on orthogonal polarization pump NFWM. To achieve better performance for the system, we study various parameters that affect system performance. The performance comparison between the proposed scheme and the traditional OPC scheme is conducted, and it is found that the system based on wavelength-shift-free OPC transmission achieves a BER of 7% for HD-FEC threshold at an ROP of -10 dBm, while the system based on traditional OPC scheme cannot achieve the decision threshold even after midpoint-shift-value calculation under this transmission condition. Our scheme can provide a theoretical basis for the design of high-speed long-distance IM-DD OFDM optical communication systems.
Acta Optica Sinica
- Publication Date: Apr. 10, 2024
- Vol. 44, Issue 7, 0706002 (2024)

A Photonics-Aided Sensing and Communication System in W-Band Based on Integrated Waveforms
Wenzhong He, Jiaxuan Liu, Xiongwei Yang, Yi Wei, Kaihui Wang, Wen Zhou, and Jianjun Yu
ObjectiveWith the continuous advancement of wireless communication and information technology, mobile data transmission volume has nearly doubled each year. Simultaneously, the proliferation of access devices and the widespread adoption of emerging technologies such as the Internet of Things (IoT), high-definition live streaming, virtual reality (VR), and augmented reality (AR) have intensified the pressing demand for high-speed communication. Nevertheless, meeting the substantial data transmission requirements remains a formidable challenge given the current communication frequencies and bandwidth limitations. The currently utilized sub-6 GHz frequency band has become relatively congested, while the frequency range spanning from 6 GHz to 300 GHz in the millimeter wave spectrum remains largely untapped, offering an exceptionally abundant spectrum resource. Furthermore, in comparison to the lower microwave frequency bands currently in commercial use, the absolute bandwidth available in the millimeter wave frequencies significantly surpasses that of the lower microwave bands. In recent years, transmission systems combining radar sensing with communication have garnered increasing attention. To mitigate the strain on the limited spectrum resources and reduce power consumption, radar and wireless communication emerge as paramount and pivotal applications within the domain of radio frequency (RF) technology. However, as technology continues to evolve, radar and communication are converging towards integrated design, whereas they are initially developed and designed independently, each catering to their distinct functions and frequency bands.MethodsIn this study, we presented an experimentally photonics-aided integrated radar and communication system. On the transmission side, the integrated signal was generated by encoding a quadrature phase shift keying (QPSK) signal onto a linear frequency-modulated (LFM) signal in the baseband, with the primary objective of eliminating the need for digital-to-analog conversion (DAC) in the intermediate frequency (IF) band. Subsequently, the joint radar communication (JRC) signal was modulated onto an optical carrier and mixed with another external cavity laser (ECL) to generate the millimeter wave LFM-QPSK signal. The adoption of QPSK encoding ensured a constant envelope for the JRC signal, a crucial aspect of long-distance radar sensing. On the receiving side, a W-band horn antenna (HA) captured a portion of the JRC signal for transmission purposes. This signal was then down-converted to an IF band by using a W-band mixer. Following de-chirping and a series of digital signal processing (DSP) steps, the QPSK signal was recovered. For radar sensing purposes, the echo signal was initially down-converted to the baseband and subsequently processed through a matched filter. Due to the well-preserved cross-correlation characteristics of the original LFM signal in the resulting millimeter wave JRC signal, precise radar synchronization was obtained through pulse compression. Consequently, this system could achieve both high-resolution radar sensing and high-speed communication functions.Results and DiscussionsWe introduce a W-band communication-aware integrated system, and its schematic diagram and algorithmic process are depicted in Fig. 2. This system successfully achieves robust communication and sensing capabilities through offline processing at the radar and communication receiver. As shown in Fig. 4, employing the de-chirping operation at the communication receiver allows us to successfully extract high-quality communication sequence signals from the integrated waveform. Subsequent offline DSP algorithms enable us to achieve communication with a significantly lower error rate than that of the hard decision threshold. As shown in Fig. 5(a), (b), and (c), we conduct experiments in different scenarios at distances of 2, 10, and 50 m, respectively. When the input power into the PD exceeds -1 dBm, each component of the integrated signal achieves high-quality communication below the hard decision threshold. Additionally, by introducing an extra frequency offset error component, the integrated signal maintains high communication quality, as demonstrated in Fig. 5(d), proving the system's robustness. On the radar sensing side, we employ pulse compression techniques to detect single and dual targets with a radar accuracy of approximately 2.0 cm. Figure 7 displays the pulse compression output results for a single target at different distances, while Fig. 8 shows the results for dual targets at varying distances. In a word, clear target detection is achieved at the radar end. These experimental results underscore the effectiveness of the proposed W-band communication-aware integrated system.ConclusionsIn this study, we have proposed and demonstrated a photonics-aided system for joint communication and radar sensing. The baseband signal is achieved by encoding an LFM with a QPSK signal. The orthogonal properties of the LFM signal enable signal demodulation, while pulse compression is utilized for radar detection. Experimental results indicate that, through signal-sharing techniques, we can achieve a distance resolution of 2.0 cm and high-quality transmission at speeds of up to 20 Gbit/s within the 91 GHz frequency band, with transmission distances of up to 50 m. Furthermore, this system allows for flexible signal type adjustments as needed, making it a promising candidate for future millimeter-wave communication applications. ObjectiveWith the continuous advancement of wireless communication and information technology, mobile data transmission volume has nearly doubled each year. Simultaneously, the proliferation of access devices and the widespread adoption of emerging technologies such as the Internet of Things (IoT), high-definition live streaming, virtual reality (VR), and augmented reality (AR) have intensified the pressing demand for high-speed communication. Nevertheless, meeting the substantial data transmission requirements remains a formidable challenge given the current communication frequencies and bandwidth limitations. The currently utilized sub-6 GHz frequency band has become relatively congested, while the frequency range spanning from 6 GHz to 300 GHz in the millimeter wave spectrum remains largely untapped, offering an exceptionally abundant spectrum resource. Furthermore, in comparison to the lower microwave frequency bands currently in commercial use, the absolute bandwidth available in the millimeter wave frequencies significantly surpasses that of the lower microwave bands. In recent years, transmission systems combining radar sensing with communication have garnered increasing attention. To mitigate the strain on the limited spectrum resources and reduce power consumption, radar and wireless communication emerge as paramount and pivotal applications within the domain of radio frequency (RF) technology. However, as technology continues to evolve, radar and communication are converging towards integrated design, whereas they are initially developed and designed independently, each catering to their distinct functions and frequency bands.MethodsIn this study, we presented an experimentally photonics-aided integrated radar and communication system. On the transmission side, the integrated signal was generated by encoding a quadrature phase shift keying (QPSK) signal onto a linear frequency-modulated (LFM) signal in the baseband, with the primary objective of eliminating the need for digital-to-analog conversion (DAC) in the intermediate frequency (IF) band. Subsequently, the joint radar communication (JRC) signal was modulated onto an optical carrier and mixed with another external cavity laser (ECL) to generate the millimeter wave LFM-QPSK signal. The adoption of QPSK encoding ensured a constant envelope for the JRC signal, a crucial aspect of long-distance radar sensing. On the receiving side, a W-band horn antenna (HA) captured a portion of the JRC signal for transmission purposes. This signal was then down-converted to an IF band by using a W-band mixer. Following de-chirping and a series of digital signal processing (DSP) steps, the QPSK signal was recovered. For radar sensing purposes, the echo signal was initially down-converted to the baseband and subsequently processed through a matched filter. Due to the well-preserved cross-correlation characteristics of the original LFM signal in the resulting millimeter wave JRC signal, precise radar synchronization was obtained through pulse compression. Consequently, this system could achieve both high-resolution radar sensing and high-speed communication functions.Results and DiscussionsWe introduce a W-band communication-aware integrated system, and its schematic diagram and algorithmic process are depicted in Fig. 2. This system successfully achieves robust communication and sensing capabilities through offline processing at the radar and communication receiver. As shown in Fig. 4, employing the de-chirping operation at the communication receiver allows us to successfully extract high-quality communication sequence signals from the integrated waveform. Subsequent offline DSP algorithms enable us to achieve communication with a significantly lower error rate than that of the hard decision threshold. As shown in Fig. 5(a), (b), and (c), we conduct experiments in different scenarios at distances of 2, 10, and 50 m, respectively. When the input power into the PD exceeds -1 dBm, each component of the integrated signal achieves high-quality communication below the hard decision threshold. Additionally, by introducing an extra frequency offset error component, the integrated signal maintains high communication quality, as demonstrated in Fig. 5(d), proving the system's robustness. On the radar sensing side, we employ pulse compression techniques to detect single and dual targets with a radar accuracy of approximately 2.0 cm. Figure 7 displays the pulse compression output results for a single target at different distances, while Fig. 8 shows the results for dual targets at varying distances. In a word, clear target detection is achieved at the radar end. These experimental results underscore the effectiveness of the proposed W-band communication-aware integrated system.ConclusionsIn this study, we have proposed and demonstrated a photonics-aided system for joint communication and radar sensing. The baseband signal is achieved by encoding an LFM with a QPSK signal. The orthogonal properties of the LFM signal enable signal demodulation, while pulse compression is utilized for radar detection. Experimental results indicate that, through signal-sharing techniques, we can achieve a distance resolution of 2.0 cm and high-quality transmission at speeds of up to 20 Gbit/s within the 91 GHz frequency band, with transmission distances of up to 50 m. Furthermore, this system allows for flexible signal type adjustments as needed, making it a promising candidate for future millimeter-wave communication applications.
Acta Optica Sinica
- Publication Date: Apr. 10, 2024
- Vol. 44, Issue 7, 0706001 (2024)

Polarization Transmission Characteristics of Blue-Green Laser in Cross-Medium Downlink
Jianlei Zhang, Yuxin Tian, Jie Wang, Yunzhou Zhu, Pengwei Zhang, Yi Yang, and Fengtao He
ObjectiveCross-medium atmospheric seawater communication is influenced by the absorption, scattering, and random wave refraction of the sea surface, which results in intensity attenuation, beam drift, and depolarization effects on the received light. Currently, the research on atmospheric seawater cross-medium channels mainly focuses on sea surface reflection and non-polarization. We aim to study the transmission of polarized light, derive the refractive model, and analyze the Stokes vector variation of photons at the atmospheric seawater interface. Furthermore, a complete polarization transmission model for laser cross-medium downlink channels is built to provide valuable references for the implementation of polarized light in atmospheric seawater communication systems.MethodsTo investigate the influence of rough dynamic sea levels on refracted polarized light, we first utilize the Elfouhaily wave spectrum and its corresponding bilateral directional transfer function to generate a dynamic three-dimensional sea surface via fast Fourier transform simulation. We then build a polarized light transmission model of laser crossing a rough air-seawater interface using the Monte Carlo method, which incorporates the photon scattering in atmospheric channels, refraction at the atmospheric seawater interface, and scattering in underwater channels. Finally, the received intensity and polarization are obtained. By adopting this model, the polarization characteristics and scintillation indices of laser propagation through atmospheric seawater channels are analyzed under different wind speeds, distances, and light divergence angles.Results and DiscussionsThe establishment of a dynamic three-dimensional sea surface and its related statistical data indicates that the increasing wind speed leads to gradually roughening sea surface and rising fluctuation range of sea surface tilt angle. When photons pass through the sea surface, the sea surface tilt angle during refraction is also more random. In exploring the effect of different sea surface wind speeds on underwater polarization, the polarization of received light decreases with the rising wind speed, which is positively correlated with the sea surface roughness at different wind speeds. As the wind speed increases, photons refract and diverge outward, resulting in an increase in scattering times and a decrease in polarization (Fig. 5). Additionally, the received light scintillation indices under different wind speeds and beam divergence angles are analyzed. As the wind speed increases, the scintillation index also rises, and the influence of the sea on the light intensity fluctuation becomes greater (Fig. 8). By changing the divergence angle of the beam, if the divergence angle gets smaller, the received photons will be refracted by a smaller area of the sea surface, thus bringing beam drifting and an increase in the scintillation index. Conversely, if the divergence angle increases, the scintillation index decreases (Fig. 9).ConclusionsWe build a dynamic three-dimensional sea surface model influenced by wind speed and a polarization transmission model for laser light across the air-seawater interface. By varying the wind speed, link distance, and laser beam divergence angle, we statistically analyze the polarization degree and scintillation index of the received beam. The results show that wind speed influences the statistical distribution of three-dimensional sea surface tilt angles and roughness. As wind speed increases, sea surface roughness rises, resulting in a decrease in the polarization degree of underwater photons. Meanwhile, the longer link distance leads to a lower polarization degree. The scintillation index measures the degree of light intensity fluctuations caused by random refraction at the sea surface. The simulation results indicate that as the wind speed increases, the scintillation index grows and the light intensity fluctuation is more strongly influenced by the three-dimensional sea surface. When the divergence angle decreases, the received light intensity is more strongly affected by the dynamic sea surface, increasing the scintillation index of the received light. Our research findings can provide theoretical references for the laser communication channel model across the rough air-seawater interface. ObjectiveCross-medium atmospheric seawater communication is influenced by the absorption, scattering, and random wave refraction of the sea surface, which results in intensity attenuation, beam drift, and depolarization effects on the received light. Currently, the research on atmospheric seawater cross-medium channels mainly focuses on sea surface reflection and non-polarization. We aim to study the transmission of polarized light, derive the refractive model, and analyze the Stokes vector variation of photons at the atmospheric seawater interface. Furthermore, a complete polarization transmission model for laser cross-medium downlink channels is built to provide valuable references for the implementation of polarized light in atmospheric seawater communication systems.MethodsTo investigate the influence of rough dynamic sea levels on refracted polarized light, we first utilize the Elfouhaily wave spectrum and its corresponding bilateral directional transfer function to generate a dynamic three-dimensional sea surface via fast Fourier transform simulation. We then build a polarized light transmission model of laser crossing a rough air-seawater interface using the Monte Carlo method, which incorporates the photon scattering in atmospheric channels, refraction at the atmospheric seawater interface, and scattering in underwater channels. Finally, the received intensity and polarization are obtained. By adopting this model, the polarization characteristics and scintillation indices of laser propagation through atmospheric seawater channels are analyzed under different wind speeds, distances, and light divergence angles.Results and DiscussionsThe establishment of a dynamic three-dimensional sea surface and its related statistical data indicates that the increasing wind speed leads to gradually roughening sea surface and rising fluctuation range of sea surface tilt angle. When photons pass through the sea surface, the sea surface tilt angle during refraction is also more random. In exploring the effect of different sea surface wind speeds on underwater polarization, the polarization of received light decreases with the rising wind speed, which is positively correlated with the sea surface roughness at different wind speeds. As the wind speed increases, photons refract and diverge outward, resulting in an increase in scattering times and a decrease in polarization (Fig. 5). Additionally, the received light scintillation indices under different wind speeds and beam divergence angles are analyzed. As the wind speed increases, the scintillation index also rises, and the influence of the sea on the light intensity fluctuation becomes greater (Fig. 8). By changing the divergence angle of the beam, if the divergence angle gets smaller, the received photons will be refracted by a smaller area of the sea surface, thus bringing beam drifting and an increase in the scintillation index. Conversely, if the divergence angle increases, the scintillation index decreases (Fig. 9).ConclusionsWe build a dynamic three-dimensional sea surface model influenced by wind speed and a polarization transmission model for laser light across the air-seawater interface. By varying the wind speed, link distance, and laser beam divergence angle, we statistically analyze the polarization degree and scintillation index of the received beam. The results show that wind speed influences the statistical distribution of three-dimensional sea surface tilt angles and roughness. As wind speed increases, sea surface roughness rises, resulting in a decrease in the polarization degree of underwater photons. Meanwhile, the longer link distance leads to a lower polarization degree. The scintillation index measures the degree of light intensity fluctuations caused by random refraction at the sea surface. The simulation results indicate that as the wind speed increases, the scintillation index grows and the light intensity fluctuation is more strongly influenced by the three-dimensional sea surface. When the divergence angle decreases, the received light intensity is more strongly affected by the dynamic sea surface, increasing the scintillation index of the received light. Our research findings can provide theoretical references for the laser communication channel model across the rough air-seawater interface.
Acta Optica Sinica
- Publication Date: Mar. 25, 2024
- Vol. 44, Issue 6, 0606005 (2024)
A Low-Complexity and Hardware-Portable Non-Linear Equalization Algorithm and Experimental Demonstration of Its Real-Time Compensation for UWOC
Huhao Xiao, Hongxi Yin, Jianying Wang, An Huang, and Xiuyang Ji
ObjectiveUnderwater wireless optical communication (UWOC) has advantages such as high bandwidth, high data rate, low latency, and small form factor. It can support the transmission of high-speed, high-capacity, real-time, and multimedia services like underwater images and videos. Light-emitting diodes (LEDs) are cost-effective light sources with high energy efficiency, and their wide-angle beam profile relaxes the alignment requirements between the transmitter and receiver. However, high-power LED sources have narrow bandwidth and exhibit strong non-linear effects. Additionally, the underwater optical channel is affected by absorption, scattering, turbulence, and bubbles, while the photodetectors may also exhibit non-linear effects. These factors lead to non-linear distortion of the optical signal, severely affecting communication bandwidth and limiting transmission distance. The Volterra algorithm is commonly used for non-linear compensation in communication systems, but it has high complexity and computational overhead. Most existing research on the Volterra algorithm involves offline processing, which is not conducive to miniaturization and low power consumption in underwater environments. Therefore, we propose a low-complexity, low-power, and hardware-friendly 3l-sVolterra (link and linear list-based sparse Volterra) algorithm for UWOC systems. By combining new data structures based on linked lists and linear lists to store all the parameters of the Volterra algorithm, the on-chip resources required for updating the Volterra algorithm's parameters are effectively reduced. It also facilitates sparse processing of the participating non-linear terms, making it suitable for small-scale hardware systems. Compared with the 3l-Volterra algorithm without sparsity operations, this algorithm reduces resource consumption by 30% while preserving similar non-linear compensation capabilities. We hope that the proposed 3l-sVolterra algorithm can promote miniaturization and real-time underwater applications of UWOC systems.MethodsThe 3l-sVolterra algorithm utilizes a combined data format of linked lists and linear lists to store the parameters for Volterra operations. The algorithm achieves parameter updates through N multiplications, one node insertion, and traversal of the remaining N-1 nodes in the linked list, significantly improving the efficiency of each update and operation. The algorithm's sparse operations on the non-linear terms further reduce on-chip resource consumption. We implement and validate the 3l-sVolterra algorithm on a low-power and miniaturize digital signal processing (DSP) chip, the C6748. We also design a DSP subsystem based on the C6748 as the core. In the receiving end, the optical signal is converted into an electrical signal by an avalanche photo diode (APD). The electrical signal is then amplified and input to an analog-to-digital conversion (ADC) module. Finally, the converted digital signal is synchronized, demodulated, and subjected to non-linear equalization by the DSP subsystem.Results and DiscussionsIn a 5 m-long underwater channel, the UWOC system employs the CAP-4 modulation scheme for data transmission. The experiment tests the compensation capability of the 3l-sVolterra algorithm in the entire UWOC system with four different memory lengths (10, 14, 18, and 20) and varying numbers of retained terms (4, 8, 12, and 16). As the memory length increases, the 3l-Volterra algorithm (the 3l-sVolterra algorithm without sparse operations) enhances the compensation capability of the entire UWOC system, achieving a channel bandwidth expansion of up to 20 Mbit/s. While maintaining similar non-linear compensation capabilities to the algorithm without sparsity operations, the 3l-sVolterra algorithm reduces on-chip resource consumption by 30%. When a non-linear compensation algorithm with a memory length of N is processed, the number of retained non-linear terms should be greater than N/2, so as to ensure the majority of non-linear compensation capability. The influence of non-linear terms beyond the N/2 range gradually diminishes. This algorithm is suitable for DSP hardware systems and can be ported to hardware systems of other architectures.ConclusionsWe propose a low-complexity, low-power, and hardware-friendly 3l-sVolterra algorithm. The algorithm adopts a new data structure that combines linked lists and linear lists to store all the parameters of the Volterra algorithm, effectively reducing the on-chip resources required for parameter updates. It also allows sparse operations on the non-linear terms of the Volterra algorithm and facilitates portability to different small-scale hardware systems. Furthermore, a DSP subsystem based on the 3l-sVol algorithm is implemented on the C6748 chip, and a UWOC system is constructed using a 5 m-long water tank to test the designed DSP subsystem. Compared with the 3l-Vol algorithm, the proposed algorithm reduces on-chip resource consumption by 30% while maintaining similar non-linear compensation capability. By changing the memory length and the number of retained terms in the Volterra algorithm, the variation of the algorithm's non-linear compensation capability in the constructed UWOC system is tested. Reducing the number of retained terms can effectively reduce the on-chip resource consumption of the Volterra algorithm. This is the first time that a non-linear equalization algorithm has been ported to a DSP chip, achieving synchronous data transmission and real-time non-linear compensation in the DSP-based UWOC system. The DSP subsystem has good compensation capability for both linear and non-linear distortions, as well as system bandwidth extension ability, which is of great significance for miniaturizing the UWOC system and promoting its real-time underwater applications. ObjectiveUnderwater wireless optical communication (UWOC) has advantages such as high bandwidth, high data rate, low latency, and small form factor. It can support the transmission of high-speed, high-capacity, real-time, and multimedia services like underwater images and videos. Light-emitting diodes (LEDs) are cost-effective light sources with high energy efficiency, and their wide-angle beam profile relaxes the alignment requirements between the transmitter and receiver. However, high-power LED sources have narrow bandwidth and exhibit strong non-linear effects. Additionally, the underwater optical channel is affected by absorption, scattering, turbulence, and bubbles, while the photodetectors may also exhibit non-linear effects. These factors lead to non-linear distortion of the optical signal, severely affecting communication bandwidth and limiting transmission distance. The Volterra algorithm is commonly used for non-linear compensation in communication systems, but it has high complexity and computational overhead. Most existing research on the Volterra algorithm involves offline processing, which is not conducive to miniaturization and low power consumption in underwater environments. Therefore, we propose a low-complexity, low-power, and hardware-friendly 3l-sVolterra (link and linear list-based sparse Volterra) algorithm for UWOC systems. By combining new data structures based on linked lists and linear lists to store all the parameters of the Volterra algorithm, the on-chip resources required for updating the Volterra algorithm's parameters are effectively reduced. It also facilitates sparse processing of the participating non-linear terms, making it suitable for small-scale hardware systems. Compared with the 3l-Volterra algorithm without sparsity operations, this algorithm reduces resource consumption by 30% while preserving similar non-linear compensation capabilities. We hope that the proposed 3l-sVolterra algorithm can promote miniaturization and real-time underwater applications of UWOC systems.MethodsThe 3l-sVolterra algorithm utilizes a combined data format of linked lists and linear lists to store the parameters for Volterra operations. The algorithm achieves parameter updates through N multiplications, one node insertion, and traversal of the remaining N-1 nodes in the linked list, significantly improving the efficiency of each update and operation. The algorithm's sparse operations on the non-linear terms further reduce on-chip resource consumption. We implement and validate the 3l-sVolterra algorithm on a low-power and miniaturize digital signal processing (DSP) chip, the C6748. We also design a DSP subsystem based on the C6748 as the core. In the receiving end, the optical signal is converted into an electrical signal by an avalanche photo diode (APD). The electrical signal is then amplified and input to an analog-to-digital conversion (ADC) module. Finally, the converted digital signal is synchronized, demodulated, and subjected to non-linear equalization by the DSP subsystem.Results and DiscussionsIn a 5 m-long underwater channel, the UWOC system employs the CAP-4 modulation scheme for data transmission. The experiment tests the compensation capability of the 3l-sVolterra algorithm in the entire UWOC system with four different memory lengths (10, 14, 18, and 20) and varying numbers of retained terms (4, 8, 12, and 16). As the memory length increases, the 3l-Volterra algorithm (the 3l-sVolterra algorithm without sparse operations) enhances the compensation capability of the entire UWOC system, achieving a channel bandwidth expansion of up to 20 Mbit/s. While maintaining similar non-linear compensation capabilities to the algorithm without sparsity operations, the 3l-sVolterra algorithm reduces on-chip resource consumption by 30%. When a non-linear compensation algorithm with a memory length of N is processed, the number of retained non-linear terms should be greater than N/2, so as to ensure the majority of non-linear compensation capability. The influence of non-linear terms beyond the N/2 range gradually diminishes. This algorithm is suitable for DSP hardware systems and can be ported to hardware systems of other architectures.ConclusionsWe propose a low-complexity, low-power, and hardware-friendly 3l-sVolterra algorithm. The algorithm adopts a new data structure that combines linked lists and linear lists to store all the parameters of the Volterra algorithm, effectively reducing the on-chip resources required for parameter updates. It also allows sparse operations on the non-linear terms of the Volterra algorithm and facilitates portability to different small-scale hardware systems. Furthermore, a DSP subsystem based on the 3l-sVol algorithm is implemented on the C6748 chip, and a UWOC system is constructed using a 5 m-long water tank to test the designed DSP subsystem. Compared with the 3l-Vol algorithm, the proposed algorithm reduces on-chip resource consumption by 30% while maintaining similar non-linear compensation capability. By changing the memory length and the number of retained terms in the Volterra algorithm, the variation of the algorithm's non-linear compensation capability in the constructed UWOC system is tested. Reducing the number of retained terms can effectively reduce the on-chip resource consumption of the Volterra algorithm. This is the first time that a non-linear equalization algorithm has been ported to a DSP chip, achieving synchronous data transmission and real-time non-linear compensation in the DSP-based UWOC system. The DSP subsystem has good compensation capability for both linear and non-linear distortions, as well as system bandwidth extension ability, which is of great significance for miniaturizing the UWOC system and promoting its real-time underwater applications.
Acta Optica Sinica
- Publication Date: Mar. 25, 2024
- Vol. 44, Issue 6, 0606004 (2024)
Orbit Forecasting, Tracking, and Pointing System Based on High-Altitude Aircraft Laser Communication
Chongmiao Jiao, Yan He, Shanjiang Hu, Chunhe Hou, Yongqiang Chen, and Weibiao Chen
ObjectiveDuring communication between the high-altitude aircraft and the underwater platform, the high-altitude aircraft moves faster and passes through the area where the underwater platform is located in a shorter time. Additionally, limitations of the receiving field of view and laser emission window of the underwater platform restrict the effective communication time, impeding the establishment of a constant optical link. The utilization of a beacon light-based communication method extends the capture time and adds complexity to the link establishment in the underwater communication platform system. To overcome these challenges, a tracking and pointing system based on the orbit forecasting of the underwater platform is devised to establish an uplink between the underwater platform and high-altitude aircraft.MethodIn contrast to the acquisition, tracking, and pointing (ATP) systems employed in space laser communications, the system we developed eliminates the need for an acquisition module. Instead, the underwater platform is required to obtain the real-time position of the aircraft during communication to achieve precise pointing of the aircraft. Several theoretical algorithms for orbit forecasting are assessed, and the Runge-Kutta method is selected for its computational efficiency. The laser pointing system structure is designed for an underwater platform, and the correlation between the motor rotation angles in two directions and the aircraft coordinates is derived. Subsequently, we develop computer software to simulate and analyze the orbit forecasting algorithm and pointing angles, which leads to the evaluation of the error results and running time. The findings support the feasibility of the tracking pointing method based on orbit forecasting. The system consists of several modules, including the laser receiver, transmitter, servo motor controller, attitude sensor, and field programmable gate array (FPGA) master control modules. To improve the reception sensitivity, the system utilizes a photomultiplier tube (PMT) with heightened sensitivity for reception. The laser receiver module is equipped with eight PMT, each with a maximum field of view (FOV) of 15°. These tubes are integrated to form a receiver array with a maximum FOV of 30°. The expansion of the receiving FOV enhances the communication coverage duration when the aircraft is in high-speed motion, thereby increasing the likelihood of receiving navigation parameter information. Additionally, the utilization of the diversity receiving technique enhances communication stability under low signal-to-noise ratios.Results and DiscussionsThe simulation results show that the orbit forecasting error does not exceed 200 m on the X-axis, 160 m on the Y-axis, and 150 m on the Z-axis within 60 s [Fig. 5(a)]. The maximum error between the forecast position and the actual position is no more than 250 m [Fig. 5(b)]. In experiments, the errors between the forecasted and actual orbits, as well as the errors in the X, Y, and Z axes coordinates, are all less than 250 m within 60 s [Fig. 6(a)]. The optical pointing angle error due to the orbit forecasting error within 60 s does not exceed 0.51 mrad at most [Fig. 6(d)]. The actual pointing results are obtained by comparing the angle feedback from the servo motors to the theoretically calculated setup angle, resulting in a mean angular error of 0.20 mrad in the pitch direction [Fig. 7(a)] and a mean angular error of 0.16 mrad in the roll direction [Fig. 7(b)]. The system pointing error is a combination of the pointing angle error caused by the error between the track forecast and the actual track position, and the error between the theoretical pointing angle calculated by the track and the pointing angle feedback by the actual motor movement. The maximum pointing error is calculated to be 0.77 mrad.ConclusionsWe design a tracking and pointing system to forecast and track the orbit of a high-altitude aircraft from an underwater platform. By receiving coordinates and navigation parameters from the aircraft, the system can rapidly calculate and forecast orbit data within 60 s, with a calculation time of 0.6 s. Based on the predicted orbit data, real-time pointing action from the platform to the aircraft can be performed. The error between the simulated motion trajectory within 60 s and the aircraft's orbit trajectory calculated by the orbit forecasting algorithm does not exceed 250 m. In the experiment, the maximum error between the aircraft orbit obtained from the orbit forecasting and the actual running orbit is within 350 m, resulting in a pointing error not exceeding 0.54 mrad. The error between the calculated pointing result from the forecasted aircraft position and the actual feedback pointing result is 0.20 mrad in the pitch direction and 0.16 mrad in the roll direction. The maximum pointing error of the system is 0.77 mrad. Our study presents a system that aims to minimize the duration required for establishing links while ensuring precise communication through pointing. The tracking and pointing system, based on a short-time prediction of the high-altitude aircraft platform is usable. ObjectiveDuring communication between the high-altitude aircraft and the underwater platform, the high-altitude aircraft moves faster and passes through the area where the underwater platform is located in a shorter time. Additionally, limitations of the receiving field of view and laser emission window of the underwater platform restrict the effective communication time, impeding the establishment of a constant optical link. The utilization of a beacon light-based communication method extends the capture time and adds complexity to the link establishment in the underwater communication platform system. To overcome these challenges, a tracking and pointing system based on the orbit forecasting of the underwater platform is devised to establish an uplink between the underwater platform and high-altitude aircraft.MethodIn contrast to the acquisition, tracking, and pointing (ATP) systems employed in space laser communications, the system we developed eliminates the need for an acquisition module. Instead, the underwater platform is required to obtain the real-time position of the aircraft during communication to achieve precise pointing of the aircraft. Several theoretical algorithms for orbit forecasting are assessed, and the Runge-Kutta method is selected for its computational efficiency. The laser pointing system structure is designed for an underwater platform, and the correlation between the motor rotation angles in two directions and the aircraft coordinates is derived. Subsequently, we develop computer software to simulate and analyze the orbit forecasting algorithm and pointing angles, which leads to the evaluation of the error results and running time. The findings support the feasibility of the tracking pointing method based on orbit forecasting. The system consists of several modules, including the laser receiver, transmitter, servo motor controller, attitude sensor, and field programmable gate array (FPGA) master control modules. To improve the reception sensitivity, the system utilizes a photomultiplier tube (PMT) with heightened sensitivity for reception. The laser receiver module is equipped with eight PMT, each with a maximum field of view (FOV) of 15°. These tubes are integrated to form a receiver array with a maximum FOV of 30°. The expansion of the receiving FOV enhances the communication coverage duration when the aircraft is in high-speed motion, thereby increasing the likelihood of receiving navigation parameter information. Additionally, the utilization of the diversity receiving technique enhances communication stability under low signal-to-noise ratios.Results and DiscussionsThe simulation results show that the orbit forecasting error does not exceed 200 m on the X-axis, 160 m on the Y-axis, and 150 m on the Z-axis within 60 s [Fig. 5(a)]. The maximum error between the forecast position and the actual position is no more than 250 m [Fig. 5(b)]. In experiments, the errors between the forecasted and actual orbits, as well as the errors in the X, Y, and Z axes coordinates, are all less than 250 m within 60 s [Fig. 6(a)]. The optical pointing angle error due to the orbit forecasting error within 60 s does not exceed 0.51 mrad at most [Fig. 6(d)]. The actual pointing results are obtained by comparing the angle feedback from the servo motors to the theoretically calculated setup angle, resulting in a mean angular error of 0.20 mrad in the pitch direction [Fig. 7(a)] and a mean angular error of 0.16 mrad in the roll direction [Fig. 7(b)]. The system pointing error is a combination of the pointing angle error caused by the error between the track forecast and the actual track position, and the error between the theoretical pointing angle calculated by the track and the pointing angle feedback by the actual motor movement. The maximum pointing error is calculated to be 0.77 mrad.ConclusionsWe design a tracking and pointing system to forecast and track the orbit of a high-altitude aircraft from an underwater platform. By receiving coordinates and navigation parameters from the aircraft, the system can rapidly calculate and forecast orbit data within 60 s, with a calculation time of 0.6 s. Based on the predicted orbit data, real-time pointing action from the platform to the aircraft can be performed. The error between the simulated motion trajectory within 60 s and the aircraft's orbit trajectory calculated by the orbit forecasting algorithm does not exceed 250 m. In the experiment, the maximum error between the aircraft orbit obtained from the orbit forecasting and the actual running orbit is within 350 m, resulting in a pointing error not exceeding 0.54 mrad. The error between the calculated pointing result from the forecasted aircraft position and the actual feedback pointing result is 0.20 mrad in the pitch direction and 0.16 mrad in the roll direction. The maximum pointing error of the system is 0.77 mrad. Our study presents a system that aims to minimize the duration required for establishing links while ensuring precise communication through pointing. The tracking and pointing system, based on a short-time prediction of the high-altitude aircraft platform is usable.
Acta Optica Sinica
- Publication Date: Mar. 25, 2024
- Vol. 44, Issue 6, 0606003 (2024)
Research and Implementation of Miniaturized Underwater Wireless Optical Communication System Based on Field Programmable Gate Array and High-Power LED Array Light Source
An Huang, Hongxi Yin, Xiuyang Ji, Yanjun Liang, Hao Wen, Jianying Wang, and Zhongwei Shen
ObjectiveUnderwater wireless optical communication (UWOC) featuring high speed, low delay, and high confidentiality can form a medium and short distance local area network (LAN) with high speed and strong real-time properties or can complement the advantages of underwater acoustic communication hybrid networking. It has become a research hotspot in recent years. The deployment and application of UWOC require high-performance, low-cost, and miniaturized practical optical transceivers. By employing a laser diode as a light source, the transmission distance is long with high speed, but the alignment of the light receiver and light sender is demanding, which is difficult for communication of non-fixed positions and orientations in the dynamic seawater environment. If the light-emitting diode (LED) is the light source, the alignment requirements can be greatly reduced, while the LED array can be adopted to enhance the light signals to extend the transmission distance. Meanwhile, the high-order modulation can be utilized to improve the problem of insufficient bandwidths. The existing UWOC systems based on LED design have a large room for improvement in transmission distance and transmission rate. Additionally, the system design can realize real-time high-order modulation, coding and signal processing, and miniaturized system integration by leveraging field programmable gate array (FPGA) at both receiving and transmitting ends, and further improve the system performance and practicality. Aiming at the application requirements of underwater UWOC with high speed, long distance, low cost, and miniaturization, we design a highly robust integrated miniaturized UWOC system based on high-power LED array and FPGA. The system can realize on-off keying (OOK) modulation, and flexibly realize high-order modulation and channel coding. Meanwhile, it can achieve a longer transmission distance and a higher transmission rate than the LED UWOC systems reported in previous references, with miniaturized integration of optical receivers and transmitters.MethodsThe optical transmitter employs 45×1 W high-power LED array as the light source and takes total internal reflection (TIR) lens and parabolic reflector tube structure as the optical antenna to realize high-order modulation and coding by FPGA. In terms of optical receivers, an avalanche photodiode-automatic gain amplifier circuit (APD-AGC) optical receiver based on FPGA is designed. After being converted into the current signal by APD, the optical signal is converted into a voltage signal by transresistance amplifier module, then amplified into a voltage signal with fixed peak amplitude by automatic gain amplifier module, and finally input to the analog-to-digital conversion (ADC) module. The receiving FPGA can synchronously demodulate and decode the received signal in real time. In real-time synchronous signal transmission, the receiving and sending ends of the system adopt FPGA to process signals, which can support the real-time synchronous underwater transmission of commonly applied OOK signals and high-order modulation signals by taking 16QAM encoded by Reed Solomon (RS) channel as an example, which can meet the application requirements under different underwater scenarios. Finally, the optical communication receiver and transmitter are miniaturized and integrated with strict waterproof packaging and practical significance.Results and DiscussionsUnder a 12 m underwater channel, the UWOC system employs OOK and 16QAM modulation for data transmission. Within the error threshold, the transmission rate of the optical terminal can reach 30 Mbps. The 16QAM bit error rate is always higher than that of the OOK system. This is because QAM modulation requires high real-time synchronization of the signal, and the wide beam of the LED array makes underwater channel synchronization difficult due to the multi-path effect. However, at the same transmission rate, 16QAM has a higher bandwidth utilization than OOK modulation, which is because the system is limited by ADC sampling rate and synchronization algorithm, the bandwidth advantage of 16QAM high-order modulation signal is not fully utilized, and there is still great potential in rate improvement. In terms of robustness, the receiver can achieve effective reception of the deviation degree from the main optical axis within 40° at a distance of 12 m, reducing the difficulty of alignment and possessing strong robustness. To test the limit transmission distance of the system, we successfully build a cross-media link communication system with a distance of 12 m water+30 m air (a total of 42 m) and transmit 22 Mbps nonreturn to zero (NRZ)-OOK shaper signal within the error decision threshold. In practical applications, the system can be applied to underwater scenarios. For example, it can be carried on the submarine to achieve underwater link deployment, and underwater node information collection or signal transmission. Additionally, its high-power LED array also supports the deployment of air-water link wireless optical communication links, such as the deployment of end machines on ships and underwater frogman or underwater robot community information interaction.ConclusionsWe design and develop a high-robustness miniaturized UWOC system based on FPGA and high-power LED array light source, which supports traditional OOK modulation and m-QAM modulation. The system is tested experimentally by taking 16QAM modulation as an example, and the results show that under the real-time transmission of a 12 m water channel, the bit error rates for OOK modulation and 16QAM modulation are 2.467×10-4 and 3.467×10-3 respectively at 30 Mbps. The 22 Mbps NRZ-OOK shaping signal 12 m water +30 m air is transmitted across media links with a bit error rate of 3.619×10-4. Additionally, the light source transmitter of a high-power LED array with optical collimation antenna and the optical receiver based on 3 mm large aperture APD automatic gain control can receive signals within 40° of the main optical axis in the 12 m underwater channel. Finally, the stringent requirements for UWOC system alignment and focusing are greatly reduced, and the system robustness for applications in the underwater environment is improved. ObjectiveUnderwater wireless optical communication (UWOC) featuring high speed, low delay, and high confidentiality can form a medium and short distance local area network (LAN) with high speed and strong real-time properties or can complement the advantages of underwater acoustic communication hybrid networking. It has become a research hotspot in recent years. The deployment and application of UWOC require high-performance, low-cost, and miniaturized practical optical transceivers. By employing a laser diode as a light source, the transmission distance is long with high speed, but the alignment of the light receiver and light sender is demanding, which is difficult for communication of non-fixed positions and orientations in the dynamic seawater environment. If the light-emitting diode (LED) is the light source, the alignment requirements can be greatly reduced, while the LED array can be adopted to enhance the light signals to extend the transmission distance. Meanwhile, the high-order modulation can be utilized to improve the problem of insufficient bandwidths. The existing UWOC systems based on LED design have a large room for improvement in transmission distance and transmission rate. Additionally, the system design can realize real-time high-order modulation, coding and signal processing, and miniaturized system integration by leveraging field programmable gate array (FPGA) at both receiving and transmitting ends, and further improve the system performance and practicality. Aiming at the application requirements of underwater UWOC with high speed, long distance, low cost, and miniaturization, we design a highly robust integrated miniaturized UWOC system based on high-power LED array and FPGA. The system can realize on-off keying (OOK) modulation, and flexibly realize high-order modulation and channel coding. Meanwhile, it can achieve a longer transmission distance and a higher transmission rate than the LED UWOC systems reported in previous references, with miniaturized integration of optical receivers and transmitters.MethodsThe optical transmitter employs 45×1 W high-power LED array as the light source and takes total internal reflection (TIR) lens and parabolic reflector tube structure as the optical antenna to realize high-order modulation and coding by FPGA. In terms of optical receivers, an avalanche photodiode-automatic gain amplifier circuit (APD-AGC) optical receiver based on FPGA is designed. After being converted into the current signal by APD, the optical signal is converted into a voltage signal by transresistance amplifier module, then amplified into a voltage signal with fixed peak amplitude by automatic gain amplifier module, and finally input to the analog-to-digital conversion (ADC) module. The receiving FPGA can synchronously demodulate and decode the received signal in real time. In real-time synchronous signal transmission, the receiving and sending ends of the system adopt FPGA to process signals, which can support the real-time synchronous underwater transmission of commonly applied OOK signals and high-order modulation signals by taking 16QAM encoded by Reed Solomon (RS) channel as an example, which can meet the application requirements under different underwater scenarios. Finally, the optical communication receiver and transmitter are miniaturized and integrated with strict waterproof packaging and practical significance.Results and DiscussionsUnder a 12 m underwater channel, the UWOC system employs OOK and 16QAM modulation for data transmission. Within the error threshold, the transmission rate of the optical terminal can reach 30 Mbps. The 16QAM bit error rate is always higher than that of the OOK system. This is because QAM modulation requires high real-time synchronization of the signal, and the wide beam of the LED array makes underwater channel synchronization difficult due to the multi-path effect. However, at the same transmission rate, 16QAM has a higher bandwidth utilization than OOK modulation, which is because the system is limited by ADC sampling rate and synchronization algorithm, the bandwidth advantage of 16QAM high-order modulation signal is not fully utilized, and there is still great potential in rate improvement. In terms of robustness, the receiver can achieve effective reception of the deviation degree from the main optical axis within 40° at a distance of 12 m, reducing the difficulty of alignment and possessing strong robustness. To test the limit transmission distance of the system, we successfully build a cross-media link communication system with a distance of 12 m water+30 m air (a total of 42 m) and transmit 22 Mbps nonreturn to zero (NRZ)-OOK shaper signal within the error decision threshold. In practical applications, the system can be applied to underwater scenarios. For example, it can be carried on the submarine to achieve underwater link deployment, and underwater node information collection or signal transmission. Additionally, its high-power LED array also supports the deployment of air-water link wireless optical communication links, such as the deployment of end machines on ships and underwater frogman or underwater robot community information interaction.ConclusionsWe design and develop a high-robustness miniaturized UWOC system based on FPGA and high-power LED array light source, which supports traditional OOK modulation and m-QAM modulation. The system is tested experimentally by taking 16QAM modulation as an example, and the results show that under the real-time transmission of a 12 m water channel, the bit error rates for OOK modulation and 16QAM modulation are 2.467×10-4 and 3.467×10-3 respectively at 30 Mbps. The 22 Mbps NRZ-OOK shaping signal 12 m water +30 m air is transmitted across media links with a bit error rate of 3.619×10-4. Additionally, the light source transmitter of a high-power LED array with optical collimation antenna and the optical receiver based on 3 mm large aperture APD automatic gain control can receive signals within 40° of the main optical axis in the 12 m underwater channel. Finally, the stringent requirements for UWOC system alignment and focusing are greatly reduced, and the system robustness for applications in the underwater environment is improved.
Acta Optica Sinica
- Publication Date: Mar. 25, 2024
- Vol. 44, Issue 6, 0606002 (2024)
Performance Analysis of RIS-Assisted FSO-RF Hybrid Systems Under Co-Channel Interference
Yang Cao, Chaoyuan Bao, Xiaofeng Peng, and Wenjun Xing
ObjectiveThe problems of spectrum limitations and co-channel interference (CCI) in radio frequency (RF) communication systems have limited the development of high-speed rate services. At the same time, free-space optical (FSO) communication is complementary to RF communication because it does not require a spectrum license and is highly resistant to interference. However, FSO communication is susceptible to atmospheric turbulence and pointing errors, which can deteriorate the communication link and even cause disruptions. In order to improve the performance of FSO systems, traditional solutions use spatial diversity, aperture averaging, and FSO-RF hybrid systems. Based on the FSO-RF hybrid system, we introduce reconfigurable intelligent surface technology in the FSO link to solve the problem of FSO being unable to carry out line-of-sight communication. Considering the CCI problem in the RF link, we propose a reconfigurable intelligent surface (RIS)-assisted FSO-RF hybrid system scheme under CCI, which further improves the performance of the system compared with the traditional FSO/RF scheme.MethodsWe present a scheme for a hybrid FSO-RF system under CCI. Firstly, reconfigurable smart surface techniques are introduced in the FSO link for the case where line-of-sight transmission is not possible for FSO communication, and CCI signals in the RF link are considered. The FSO link obeys the Gamma-Gamma distribution, and the RF link obeys the Rayleigh distribution. In addition, a decode-and-forward protocol is used at the optoelectronic switching relay node. Then, based on the probability density function of the system end-to-end instantaneous signal-to-noise ratio (SNR), closed-form expressions for the system outage probability and average bit error rate (BER) are derived, and Monte Carlo simulation is used to verify the accuracy of the results. Finally, the corresponding conclusions are drawn based on the diversity order of the system.Results and DiscussionsWith a fixed average SNR of the FSO link, the outage probability performance of the system deteriorates as the H and CCI SNR increase, i.e. when the number of interfering signals at the destination node and the corresponding SNR increase. Moreover, under the same parameter conditions, the RIS-assisted system can achieve an outage probability of 10-4, while the conventional hybrid system can only achieve an outage probability of 10-2, indicating that the performance of the RIS-assisted two-hop hybrid FSO-RF system under CCI is much better than that of the traditional FSO/RF system (Fig. 2). The performance of the proposed FSO-RF hybrid system is better than that of the traditional FSO/RF hybrid system under the same parameters with fixed average SNR of the RF link and for different pointing error coefficients on the outage probability of the system. For the RIS-assisted hybrid system, when the pointing error coefficient is reduced from 1.23 to 0.73, the outage probability of the system increases significantly, indicating that the pointing error coefficient is the dominant factor affecting the outage probability of the system (Fig. 3). The effect of five modulation methods on the average BER of the system is analyzed for a fixed FSO link average SNR. The two modulation methods, differential binary phase shift keying (DBPSK) and noncoherent binary frequency shift keying (NBFSK), are close in effect, but DBPSK performs better. The RIS-assisted hybrid system can significantly reduce the average BER compared with the traditional FSO/RF system with the same modulation, i.e. both using BPSK. The results are consistent with the simulation results, indicating the accuracy of the obtained formulae (Fig. 5). The effect of the five modulation methods on the average BER of the system is analyzed for a fixed RF link average SNR, with low BER. DBPSK>NBFSK>OOK>BFSK>BPSK when γˉSR is less than 30 dB. NBFSK>DBPSK>OOK>BFSK>BPSK when γˉSR is higher than 30 dB. In comparison with the traditional FSO/RF system, the two BERs can largely coincide under high SNR conditions considering the effect of strong pointing errors, but for low SNR conditions, the performance of the RIS-assisted hybrid system is significantly improved (Fig. 6).ConclusionsIn this paper, the performance of RIS-assisted FSO-RF hybrid systems under CCI is investigated. The FSO link under RIS assistance obeys the Gamma-Gamma distribution, and the RF link in the presence of CCI obeys the Rayleigh distribution. The decode-and-forward protocol is used at the relay node, and closed-form expressions for the system outage probability and the average BER are derived. In addition, to obtain more significant conclusions, an asymptotic analysis of the outage probability is also provided in this paper, and Monte Carlo simulations are performed to analyze them numerically. The simulation results show that HD detection outperforms IM/DD detection among the different light detection methods and that this detection method is effective in combating the effects of atmospheric turbulence on the system. Compared with the traditional FSO/RF system, the performance of the proposed system solution in this paper is greatly improved with the assistance of RIS, even in the presence of CCI. ObjectiveThe problems of spectrum limitations and co-channel interference (CCI) in radio frequency (RF) communication systems have limited the development of high-speed rate services. At the same time, free-space optical (FSO) communication is complementary to RF communication because it does not require a spectrum license and is highly resistant to interference. However, FSO communication is susceptible to atmospheric turbulence and pointing errors, which can deteriorate the communication link and even cause disruptions. In order to improve the performance of FSO systems, traditional solutions use spatial diversity, aperture averaging, and FSO-RF hybrid systems. Based on the FSO-RF hybrid system, we introduce reconfigurable intelligent surface technology in the FSO link to solve the problem of FSO being unable to carry out line-of-sight communication. Considering the CCI problem in the RF link, we propose a reconfigurable intelligent surface (RIS)-assisted FSO-RF hybrid system scheme under CCI, which further improves the performance of the system compared with the traditional FSO/RF scheme.MethodsWe present a scheme for a hybrid FSO-RF system under CCI. Firstly, reconfigurable smart surface techniques are introduced in the FSO link for the case where line-of-sight transmission is not possible for FSO communication, and CCI signals in the RF link are considered. The FSO link obeys the Gamma-Gamma distribution, and the RF link obeys the Rayleigh distribution. In addition, a decode-and-forward protocol is used at the optoelectronic switching relay node. Then, based on the probability density function of the system end-to-end instantaneous signal-to-noise ratio (SNR), closed-form expressions for the system outage probability and average bit error rate (BER) are derived, and Monte Carlo simulation is used to verify the accuracy of the results. Finally, the corresponding conclusions are drawn based on the diversity order of the system.Results and DiscussionsWith a fixed average SNR of the FSO link, the outage probability performance of the system deteriorates as the H and CCI SNR increase, i.e. when the number of interfering signals at the destination node and the corresponding SNR increase. Moreover, under the same parameter conditions, the RIS-assisted system can achieve an outage probability of 10-4, while the conventional hybrid system can only achieve an outage probability of 10-2, indicating that the performance of the RIS-assisted two-hop hybrid FSO-RF system under CCI is much better than that of the traditional FSO/RF system (Fig. 2). The performance of the proposed FSO-RF hybrid system is better than that of the traditional FSO/RF hybrid system under the same parameters with fixed average SNR of the RF link and for different pointing error coefficients on the outage probability of the system. For the RIS-assisted hybrid system, when the pointing error coefficient is reduced from 1.23 to 0.73, the outage probability of the system increases significantly, indicating that the pointing error coefficient is the dominant factor affecting the outage probability of the system (Fig. 3). The effect of five modulation methods on the average BER of the system is analyzed for a fixed FSO link average SNR. The two modulation methods, differential binary phase shift keying (DBPSK) and noncoherent binary frequency shift keying (NBFSK), are close in effect, but DBPSK performs better. The RIS-assisted hybrid system can significantly reduce the average BER compared with the traditional FSO/RF system with the same modulation, i.e. both using BPSK. The results are consistent with the simulation results, indicating the accuracy of the obtained formulae (Fig. 5). The effect of the five modulation methods on the average BER of the system is analyzed for a fixed RF link average SNR, with low BER. DBPSK>NBFSK>OOK>BFSK>BPSK when γˉSR is less than 30 dB. NBFSK>DBPSK>OOK>BFSK>BPSK when γˉSR is higher than 30 dB. In comparison with the traditional FSO/RF system, the two BERs can largely coincide under high SNR conditions considering the effect of strong pointing errors, but for low SNR conditions, the performance of the RIS-assisted hybrid system is significantly improved (Fig. 6).ConclusionsIn this paper, the performance of RIS-assisted FSO-RF hybrid systems under CCI is investigated. The FSO link under RIS assistance obeys the Gamma-Gamma distribution, and the RF link in the presence of CCI obeys the Rayleigh distribution. The decode-and-forward protocol is used at the relay node, and closed-form expressions for the system outage probability and the average BER are derived. In addition, to obtain more significant conclusions, an asymptotic analysis of the outage probability is also provided in this paper, and Monte Carlo simulations are performed to analyze them numerically. The simulation results show that HD detection outperforms IM/DD detection among the different light detection methods and that this detection method is effective in combating the effects of atmospheric turbulence on the system. Compared with the traditional FSO/RF system, the performance of the proposed system solution in this paper is greatly improved with the assistance of RIS, even in the presence of CCI.
Acta Optica Sinica
- Publication Date: Mar. 25, 2024
- Vol. 44, Issue 6, 0606001 (2024)
Topics
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20